



Es una 4s de 2200 mah que tenía por ahi que para hacer las pruebas de vuelo me sobra y si le saco punta ya pillar una 5000 o así.
Si, los primeros pinitos fueron con drones tipo carreras y FS. He montado un 220mm, un 90mm y ahora tengo en vereda un 65mm y la verdad es que su montaje me parece increiblemente mas sencillo que este otro tippo de dron.
De todas formas amigo, estoy muy contento. El otro día en modo "incosciente" le eche un par, lo saqué de la casa y cuando vi que pillo GPS y me permitía armar lo probé. Solo probe stabilice y loiter y aguanta en el sitio perfectamente. No me atreví con RTL porque no sabía a que altura iba a subir y tal.
Contento porque ya se que navega y me permite seguir adelante con el osd, pantalla y servo de liberación.
Tengo que corregir pitch y jaw que van al reves y luego mirar a ver porque vibra tanto, es exagerado. Supongo que tmb será por las hélices y porque el montaje esta a medias, cables colgando, sin equilibrar el peso, etc.
El tema de la bateria tampoco me precupa tanto. De momento lleva colgando el salvalipos y la Pix vive engañada.
Pensando ya en mi siguente proyecto que me sobra una pix y veo porahi que corren, navegan y vuelan jajaja ya veremos. De momento también quiero montar una versión muy mejorada del Hovercraft que hice casero. A ver si consigo que sea anfibio.
Un saludo te mentengo informado del 450.
error de armado Pixhawk


Re: error de armado Pixhawk
Me lo imaginaba, pues ponle una 3S y se acabarán los problemas.
No todos los componentes del dron aguantan 4S(recuerda que son chinos y no hay garantía de que lo que pongan en las características sea verdad), así que si pones 2S-4S, en el centro está la seguridad(3S).
https://www.youtube.com/watch?v=IqkHg2LfQes
https://www.youtube.com/watch?v=-372CjlJZx4
https://www.youtube.com/watch?v=lSnwybaURSQ
RTL_ALT 1500 cm Sube 15 metros antes de inicial el RTL, yo lo suelo poner a 500(5 metros), a 0 no hace ninguna subida y se desplaza a la altura que esté y hace el RTL.
Un saludo
No todos los componentes del dron aguantan 4S(recuerda que son chinos y no hay garantía de que lo que pongan en las características sea verdad), así que si pones 2S-4S, en el centro está la seguridad(3S).
https://www.youtube.com/watch?v=IqkHg2LfQes
https://www.youtube.com/watch?v=-372CjlJZx4
https://www.youtube.com/watch?v=lSnwybaURSQ
RTL_ALT 1500 cm Sube 15 metros antes de inicial el RTL, yo lo suelo poner a 500(5 metros), a 0 no hace ninguna subida y se desplaza a la altura que esté y hace el RTL.
Un saludo
Re: error de armado Pixhawk
Bueno. Vuela y RTL probado y correcto. El gancho de liberación funciona correctamente. Tengo que grabar un video del tema que es mas visual.
El tema de la bateria 3S un poco más adelante lo solucionaré que de momento para hacer las pruebas voy bien con esta.
Ahora bien, siguente round. Tengo conectada una controladora LED Mavlink en el Telem2 y un cable que solde en "Y" conectado al OSD. En Telem1 tengo la 3dr.
El minim OSD le he puenteado para que funcione todo con 5v, la camara se alimenta del Ubec de 5V y el VTX directamente de la bateria. Funciona todo correctamente pero el OSD da el mensaje "Waiting for MAVLINK hearbeats".
Como todo se alimenta del la misma bateria he puesto en parametros "TELEM_DELAY=10" para ver si era un problema de sincronizacion, pero entonces ni siquiera me sale OSD en pantalla. He cambiado los puertos en la pix y me da el mismo aviso. La conexion esta correcta, del TX de la Pix al RX del OSD.
Solo me queda pensar que el empalme "Y" que hice con la controladora LED lo tenga que hacer si o si con la 3DR, pero me da miedo la que tengo que liar para probar eso, entonce vengo a consultas ... ¿Alguna luz sobre el asunto?
El tema de la bateria 3S un poco más adelante lo solucionaré que de momento para hacer las pruebas voy bien con esta.
Ahora bien, siguente round. Tengo conectada una controladora LED Mavlink en el Telem2 y un cable que solde en "Y" conectado al OSD. En Telem1 tengo la 3dr.
El minim OSD le he puenteado para que funcione todo con 5v, la camara se alimenta del Ubec de 5V y el VTX directamente de la bateria. Funciona todo correctamente pero el OSD da el mensaje "Waiting for MAVLINK hearbeats".
Como todo se alimenta del la misma bateria he puesto en parametros "TELEM_DELAY=10" para ver si era un problema de sincronizacion, pero entonces ni siquiera me sale OSD en pantalla. He cambiado los puertos en la pix y me da el mismo aviso. La conexion esta correcta, del TX de la Pix al RX del OSD.
Solo me queda pensar que el empalme "Y" que hice con la controladora LED lo tenga que hacer si o si con la 3DR, pero me da miedo la que tengo que liar para probar eso, entonce vengo a consultas ... ¿Alguna luz sobre el asunto?
Re: error de armado Pixhawk
Pon una imagen del OSD para saber exactamente el modelo que es.
TELEM_DELAY es para el retraso en segundos de la comunicación entre la OSD y la controladora, pero no suele dar ningún problema poniéndola a "0"
El mensaje "Esperando latidos MAVLINK" es que no recibe señal o datos de la controladora. Controla la Rx-Tx, usa sin cable en "Y", ya que al usar dos componentes, a veces unos van en recta "Tx-Tx y Rx-Rx" y otros invertidos "Tx-Rx y Rx-Tx".
https://www.youtube.com/watch?v=VQXGq2xrSNU
Tienes que poner un expansor I2C para conectar varias cosas en el mismo puerto.
https://mega.nz/file/wPxxGYYQ#ntu-CjbQd ... 6Z9EQzHZcc
Un saludo
TELEM_DELAY es para el retraso en segundos de la comunicación entre la OSD y la controladora, pero no suele dar ningún problema poniéndola a "0"
El mensaje "Esperando latidos MAVLINK" es que no recibe señal o datos de la controladora. Controla la Rx-Tx, usa sin cable en "Y", ya que al usar dos componentes, a veces unos van en recta "Tx-Tx y Rx-Rx" y otros invertidos "Tx-Rx y Rx-Tx".
https://www.youtube.com/watch?v=VQXGq2xrSNU
Tienes que poner un expansor I2C para conectar varias cosas en el mismo puerto.
https://mega.nz/file/wPxxGYYQ#ntu-CjbQd ... 6Z9EQzHZcc
Un saludo
- Adjuntos
-
Re: error de armado Pixhawk
Bueno. el tema es que el OSD no funciona cuando está conectado con el cable "Y" con la radio 3dr o con las luces led. Si que funciona correctamente desconectando el 3DR. Como de momento la radio 3DR solo la uso para conectar con mPlanner en el PC, lo que hago es desconectar la radio para volar y ya tengo OSD. Una vieja camara FPV y un VTX hacen el resto y así por lo menos veo datso de telemetrai en el movil y la imagen de la camara FPV hasta que encuentre el porqué no funciona conectando OSD y Radio.
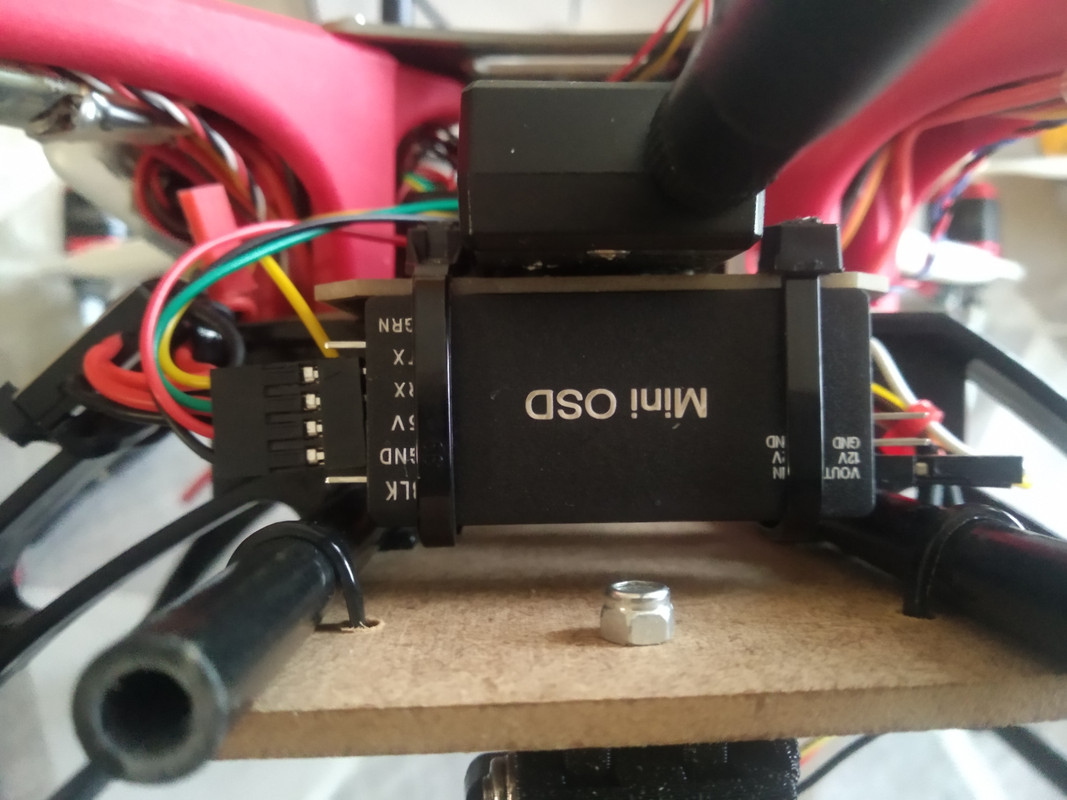
Está bien conectado, del tx del cable "Y" al RX del OSD.
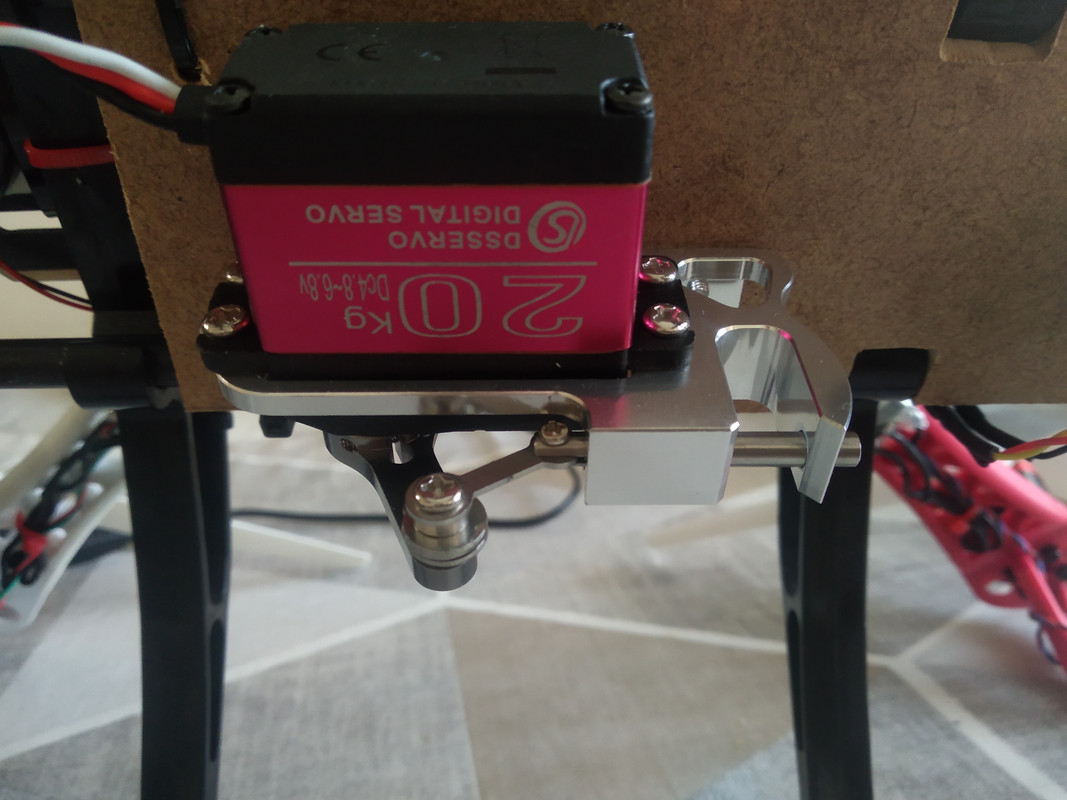
Esa tabilla fina me tapa el cableado de abajo y me da soporte para el mecanismo de liberación, que la verdad lleva un servo muy pesado ...
https://www.youtube.com/watch?v=qg02kRkqlqs
En un ratico me voy al campo y aprovecharé para probrar ya el OSD y la recepcion de imagen en el móvil a ver que tal. Grabaré un pequeño video para ver resultados. Por cierto, la bateria te he hecho caso y viene de camino, una 3S 5000 mah.

Un saludo gente
Está bien conectado, del tx del cable "Y" al RX del OSD.
Esa tabilla fina me tapa el cableado de abajo y me da soporte para el mecanismo de liberación, que la verdad lleva un servo muy pesado ...
https://www.youtube.com/watch?v=qg02kRkqlqs
En un ratico me voy al campo y aprovecharé para probrar ya el OSD y la recepcion de imagen en el móvil a ver que tal. Grabaré un pequeño video para ver resultados. Por cierto, la bateria te he hecho caso y viene de camino, una 3S 5000 mah.
Un saludo gente
Re: error de armado Pixhawk
Yo, hace mucho tiempo que me canse del transmisor 433 Mkz por ese mismo problema, así que puse uno Wi-Fi, este sistema tiene una pega, que consume mucha energía, por eso pongo Ubec o bec de 3 amp.
https://www.youtube.com/watch?v=o_GUKIcGod0
Es el que utilizo para conectarme al PC y va muy bien.
No se si me explique bien la última vez, pero bueno, si lo has solucionado así, pues vale.
Otro tema, tienes que procurar que no pase de 1,5 Kgrs. ya que se hace ingobernable el dron según le aumentes el peso. Es mejor volarlo suavemente.
Para despegar y aterrizar suave, yo le tengo puestas las patas en los brazos, coge mas superficie y estabiliza mejor, algunas están hechas con impresora 3D. Es otro mundo si vienes de drones de carreras.
Un saludo
https://www.youtube.com/watch?v=o_GUKIcGod0
Es el que utilizo para conectarme al PC y va muy bien.
No se si me explique bien la última vez, pero bueno, si lo has solucionado así, pues vale.
Otro tema, tienes que procurar que no pase de 1,5 Kgrs. ya que se hace ingobernable el dron según le aumentes el peso. Es mejor volarlo suavemente.
Para despegar y aterrizar suave, yo le tengo puestas las patas en los brazos, coge mas superficie y estabiliza mejor, algunas están hechas con impresora 3D. Es otro mundo si vienes de drones de carreras.
Un saludo
- Adjuntos
-
-
- Pata.jpg (33.43 KiB) Visto 1854 veces
-
- Telemetria WIFI.jpg (74.79 KiB) Visto 1855 veces
